主要组成
机器人主要由机器人本体、末端执行器、控制柜、示教器、配电箱等组成。
工业机器人系统组成介绍视频

机器人系统基本组成
1. 机器人本体
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
2. 末端执行器
工业机器人的末端执行器也叫做机器人手爪,它是装在工业机器人手腕上直接抓握工件或执行作业的部件。机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
3. 控制柜
控制柜集成了机器人的控制系统,是整个机器人系统的神经中枢。它由计算机硬件、软件和一些专用电路构成, 其软件包括控制器系统软件、机器人专用语言、机器人运动学及动力学软件、机器人控制软件、机器人自诊断及保护软件等。 控制器负责处理机器人工作过程中的全部信息和控制其全部动作。
4. 示教器
机器人示教编程器是操作者与机器人间的主要交流界面。操作者通过示教编程器对机器人进行各种操作、示教、编制程序,并可直接移动机器人。 机器人的各种信息、状态通过示教编程器显示给操作者。此外,还可通过示教编程器对机器人进行各种设置。
连接电缆
1. 动力电缆
控制柜 XP1 端口插入动力电缆插头,再将动力电缆标有 R1.MP 的插头插入工业机器人本体底座的插头上。 动力电缆将驱动电力从控制柜中的驱动装置传送到机器人电动机。

动力电缆
2. SMB电缆
控制柜 XS2 端口插入 SMB 电缆直头接口,再将SMB电缆弯头接头插入工业机器人本体底座 R1.SMB 端。 SMB 电缆将编码器数据传输到编码器接口板。

SMB电缆
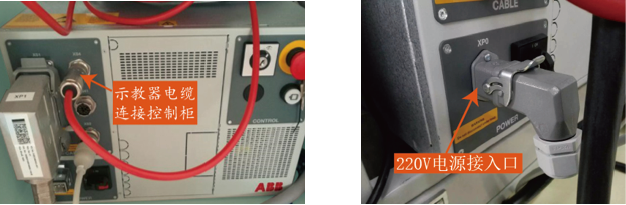
3. 示教器电缆
控制柜 XS4 端口插入示教器电缆的接头。示教器电缆用于示教器与机器人控制柜的通信连接。
4. 220V电源电缆
XP0 为 220V 电源接入口,用于控制柜主电源的接入。
| 示教器电缆 | 电源电缆 |
工业机器人系统组成动画