系统结构
机器人主要由机器人本体、控制柜、示教盒、配电箱等组成。

机器人系统基本组成
连接电缆
1. 动力电缆
控制柜 XS1 端口插入动力电缆插头,再将动力电缆标有 R1.MP 的插头插入工业机器人本体底座的插头上。 动力电缆将驱动电力从控制柜中的驱动装置传送到机器人电动机。

动力电缆
2. SMB电缆
控制柜 XS2 端口插入 SMB 电缆直头接口,再将SMB电缆弯头接头插入工业机器人本体底座 R1.SMB 端。 SMB 电缆将编码器数据传输到编码器接口板。

SMB电缆
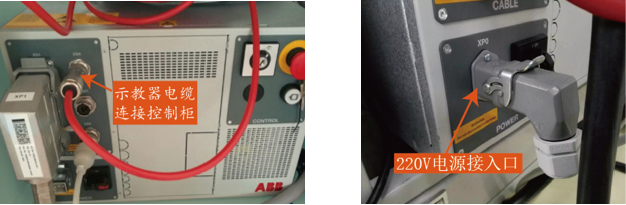
3. 示教器电缆
控制柜 XS4 端口插入示教器电缆的接头。示教器电缆用于示教器与机器人控制柜的通信连接。
4. 220V电源接入口
XP0 为 220V 电源接入口,用于控制柜主电源的接入。
| 示教器电缆 | 电源电缆 |