手腕运动形式
工业机器人手腕是在机器人末端执行器和臂部之间,用于支撑和调整末端执行器的部件,有助于末端执行器呈现期望的姿态扩大臂部运动范围,增 加机器人的自由度,通常由2个或3个自由度组成。例如,设想用机器人的末端执行器夹持一个螺钉对准螺孔拧入,首先必须使螺钉前端到达螺孔 入口,然后必须使螺钉的轴线对准螺孔的轴线,使轴线重合后拧入。这就需要调整螺钉的方位角,前者即末端执行器的位置,后者即末端执行器的 姿态。
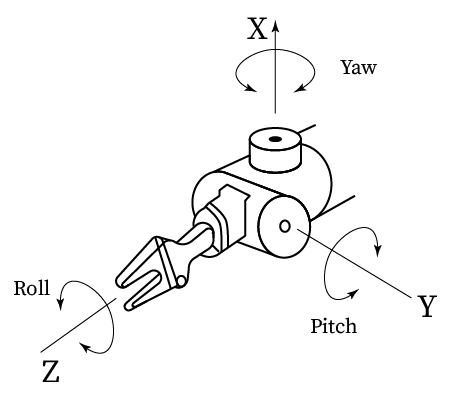
当手腕进行翻转运动(Roll)时,用R表示;当手腕进行俯仰运动(Pitch)时,用P表示;当手腕进行偏转运动(Yaw)时,用Y表示,如图所示。